
Робототехніка та її наукові проблеми

Стаття написана Павлом Чайкою, головним редактором журналу «Пізнавайка». З 2013 року з моменту заснування журналу Павло Чайка присвятив себе популяризації науки в Україні та світі. Основна мета як журналу, так і цієї статті – пояснити складні наукові теми простою та доступною мовою.
Призначення роботів і маніпуляторів — відтворювати рухові функції біологічних систем, особливо верхніх і нижніх кінцівок людини, коли та виконує ті чи інші робочі та транспортні рухи. Є два шляхи: або механічний пристрій управляється людиною, копіює рухи оператора, або рухи ці будуються штучно, з допомогою спеціальних автоматів. Завдання, таким чином, полягає в тому, що треба передати на відстань природні рухи людини або ж відтворити їх «технічно». Щоб впоратися з ним, конструктору необхідно закласти у свою модель дві особливості, властиві її живому прототипу: високу функціональність, тобто здатність відтворювати не два-три, а цілий великий клас рухів (бо тільки при цій умові можна в якійсь мірі моделювати універсальність кінцівок людини) і високу надмірність, тобто велике число ступенів рухливості виконавчих органів, тому що тільки за цієї умови можна забезпечити відповідний рівень функціональності).
Висока функціональність і висока надмірність — ось дві головні взаємопов’язані особливості систем робототехніки, які викликають до життя більшість пов’язаних з нею наукових проблем.
Незалежно від того, чи працює робот вручну або автоматично, він взаємодіє з навколишнім середовищем, в кінцевому рахунку, використовуючи свої механічні руки та ноги. Природно, що в робототехніці, перш за все, виникає найзагальніша проблема — розробити методи аналізу і синтезу виконавчих органів (тобто штучних кінцівок) роботів.
Мова йде, насамперед, про те, щоб розвинути і пристосувати до потреб робототехніки традиційні методи теорії машин, які вже давно широко застосовуються в різних галузях машинобудування. У цьому напрямку зроблено досить багато. Створені, наприклад, методи, алгоритми і програми, що дозволяють аналізувати і розраховувати кінематику і динаміку маніпуляторів.
Однак до скільки-небудь повного вирішення цієї проблеми ще далеко. Справа в тому, що руки маніпуляторів являють собою так звані «розімкнуті кінематичні ланцюги стрижневого типу». Це означає, що довжина кожної зі складових їх ланок дуже велика в порівнянні з товщиною. Звідси — невисока жорсткість системи, коливання в ній. А тут ще зазори в рухливих зчленуваннях, велика протяжність гідро або пневмокомунікацій, за якими передається потужність до ланок кінематичних ланцюгів.
Але справа ще більше ускладнюється, коли мова заходить про розгорнуті маніпуляційні пристрої. Робот повинен вміти оперувати то постійними, то змінними масами в самих різних умовах. Завдання конструктора — забезпечити стійкість робота під час руху по нерівній поверхні або в ті моменти, коли він виконує робочі операції, створити пристрої, які дозували б сили і моменти, що генеруються власними джерелами потужності робота, і додатково вивчити коливальні властивості такої системи, важливі як з точки зору її динаміки і стійкості, так і щодо досяжної точності її роботи. Природно, весь цей комплекс завдань вирішити вкрай важко.
Потрібні глобальні оцінки, що охоплюють не приватні стани системи і не окремі рухи, а весь її конфігураційний простір, всю множинність рухів, можливих в цьому просторі. Іншими словами, необхідні оцінки, адекватні основним властивостям системи — її високій функціональності, відчувається гостра потреба в гіпотезах та ідеях, на базі яких такі оцінки можна було б формувати, та критеріях, що дозволяють кількісно виразити ці оцінки.
Одна з таких глобальних оцінок — так званий метод обсягів. Ідея його зводиться до наступного.
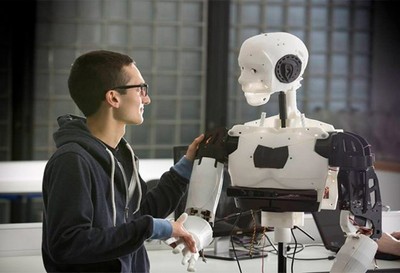
На малюнку ви бачите робота антропоморфного, тобто людиноподібного типу. Під час роботи його захват зуміє брати, класти, повертати, відгвинчувати і загвинчувати різні деталі, які можуть перебувати в самих різних точках робочого простору. В деяких точках цього простору захват може здійснювати повний сферичний рух, і тоді ми говоримо, що коефіцієнт обслуговування маніпулятора дорівнює одиниці. В інших точках, наприклад, на кордоні робочого об’єму, де всі ланки маніпулятора витягуються в пряму лінію, і захват позбавлений можливості рухатися – коефіцієнт цей дорівнює нулю.
Для оцінки «якості» «руки» маніпулятора, тобто її функціональності, можна тепер використовувати величину середнього значення коефіцієнта обслуговування, обчислену для всього простору його конфігурації, або, застосовуючи вже вживану назву, величину його сервісу.
Метод обсягів потрібен не тільки для аналізу функціональності різних маніпуляторів, для їх порівняння між собою. Він служить в руках інженера потужним інструментом розрахунку роботів — дозволяє визначати оптимальні співвідношення між довжинами окремих ланок: плеча, передпліччя і кисті. Конструктор отримує можливість, варіюючи ці величини, весь час звіряти отриманий результат з критерієм функціональності.
Ми більш-менш детально охарактеризували проблему механіки рухових органів, систем робототехніки і поки нічого не сказали про управління їх рухами. В області робототехніки, як у ряді інших галузей машинобудування, проблеми механіки і управління так тісно переплетені, що часом просто нероздільні. Проектуючи структуру, кінематику і динаміку механізмів робота, конструктор тим самим задає необхідні параметри систем управління ними, і, навпаки, розрахунок і проектування пристроїв електро-, пневмо-, гідроприводу, складових систему управління, в кінцевому рахунку для того і проводиться, щоб забезпечити потрібну «механіку» виконавчих механізмів роботів.
Сьогоднішні «атомні», «глибоководні» і завтрашні «космічні» роботи ведуть і будуть вести свою роботу в зонах і на умовах, недоступних або небезпечних для здоров’я і життя людини. А з іншого боку, ці процеси і операції в переважній більшості випадків надзвичайно складні, вони не піддаються попередньому рахунку і жорсткому програмуванню, для їх реалізації потрібна людина-оператор. Ця конфліктна ситуація, що виникла близько сорока років тому, була вирішена, коли вдалося створити так звані «копіюючі системи». Виконавчі руки маніпулятора, що копіює трудяться в небезпечному або недоступному для людини місці, а сама людина – оператор і органи керування розміщуються в безпечній зоні.
Органи управління можуть являти собою або механізми, аналогічні механізмам виконавчих рук маніпулятора, або набір кнопок, рукояток, перемикачів. Незалежно від конструкції цих пристроїв їх зазвичай називають копіюючими, оскільки вони або копіюють рухи оператора, або «копіюють» програму управління виконавчими руками, генеровану їм з допомогою кнопок, рукояток, перемикачів.
Треба сказати, що функції людини по управлінню машинами традиційного типу зазвичай обмежуються порівняно простими і рідкісними операціями включення, переключення, загалом мало впливають на точність і продуктивність роботи машини. У копіюючих установках робототехніки справа йде зовсім інакше. Тут оператор безперервно бере участь в роботі машини, реалізуючи складні програми управління. Користуючись зоровим і тактильним зворотними зв’язками, він безперервно будує і координує рухи — дрібні і розмашисті, плавні і швидкі, дозує зусилля. Оператор і маніпулятор утворюють при цьому єдину біотехнічну систему, продуктивність і точність якої найвищою мірою залежить від того, наскільки добре узгоджені вхідні і вихідні характеристики її окремих частин.
У теорії машин і в теорії автоматичного управління розробляються методи і засоби, що дозволяють оцінити кінематичні, динамічні і точнісні характеристики технічної частини цієї системи. Що ж стосується її біологічної «частини» людини-оператора, то ні біомеханіка, ні біофізика на сучасному рівні їх розвитку не дають нам ні методів, ні даних, ні характеристик в обсязі, необхідному для вирішення багатьох завдань робототехніки.
Може здатися дивним, що сьогодні, у століття автоматизації, «раптом» набуває важливість раніше фактично навіть не існуюча теорія ручного управління машинами. Тим не менш, це факт, який поряд з багатьма іншими фактами тісної взаємодії людини і машини в таких системах, як екзоскелетони, деякі типи крокуючих машин, протезні пристрої, висуває ще одну важливу наукову проблему робототехніки: розвиток методів біомеханіки стосовно до вивчення робочих рухів людини.

Які завдання ставить робототехніка перед біомеханікою? Головне з них полягає в наступному. Оскільки в системах робототехніки та протезування людина і машина (або людина та протезний пристрій) пов’язані настільки тісно, що утворюють як би єдину біотехнічну систему, то навички і тренованість оператора повинні дати їй можливість працювати протягом тривалого часу з заданими точністю і продуктивністю. Тобто «технічна частина» пред’являє до «біологічної частини» якісь вимоги. Виявляється, однак, що наскільки легко подібні вимоги сформулювати словесно, настільки ж важко висловити їх кількісно – оцінити ступінь взаємовідповіді обох частин системи.
Зараз нам зазвичай доводиться задовольнятися суб’єктивними оцінками типу: «легко», «важко», «зручно», і т. д. Звичайно, оскільки мова в них йде про відчуття і сприйняття живої людини, висновки ці важливі. Але вони вкрай недостатні. І тому розробка передумов і критеріїв, що дають не тільки якісні, але і кількісні оцінки особливостей і властивостей біотехнічних систем, складає важливий розділ проблеми біомеханіки робочих рухів, що відповідає інтересам робототехніки.
Ось всього один приклад для ілюстрації сказаного. У деяких дуже відповідальних випадках розміри кабіни управління повинні робитися гранично тісними, що, природно, сильно обмежує простір рухів оператора. Якщо руки робота строго копіюють дії оператора, то виходить прикра ситуація: робочий об’єм виконавчих рук вимушено обмежується, хоча вони і знаходяться у вільному просторі. В Інституті машинознавства був теоретично обгрунтований і експериментально досліджений спосіб управління, заснований на тому, що за допомогою спеціального пристрою положення задаючих та виконавчих органів маніпулятора можуть бути або, як зазвичай, повністю узгоджені між собою, або можуть бути неузгоджені.
Такий спосіб управління дозволяє значно розширити обсяг обслуговування. Але зате при тому чи іншому розузгодженні людських і машинних рук простота, природність управління в тій чи іншій мірі втрачається. Мета дослідження полягала в тому, щоб оцінити можливості і якість такого способу ручного управління.
Подібно до того, як в методі обсягів був введений коефіцієнт обслуговування, тут з’явилося поняття про коефіцієнт мнемонічності системи. Це величина, що зв’язує напрямок і величину відхилення руки оператора з тими рухами, що здійснює при цьому механічна рука маніпулятора. Були розроблені алгоритми, що дозволяють розрахувати величини цього коефіцієнта і побудувати зони і обсяги для різного рівня мнемонічності. Одночасно велося експериментальне дослідження, ми прагнули оцінити здібності оператора компенсувати введену неузгодженість і пов’язані з компенсацією втрати точності і продуктивності.
Вдалося отримати ряд цікавих і практично важливих результатів, наприклад, було встановлено, що без істотної втрати якості управління і без збільшення розмірів кабіни можна значно розширити робочий простір виконавчих органів. І тут мета роботи полягала в тому, щоб дати розробникам способи і методи глобальної оцінки властивостей системи, але в методі обсягів мова йшла про властивості тільки одної виконавчої руки, тут же — про оцінку відносних властивостей двох рук, задаючої і виконавчої, двох конфігураційних просторів.
Значення біомеханіки як проблеми робототехніки, звичайно, не вичерпується тільки розвитком теорії і методів ручного управління. Важливі розділи цієї проблеми пов’язані з широким вивченням рухових функцій і адаптаційних механізмів людини і тварин і відповідної діяльності мозку, нервової і м’язової систем та органів чуття. Безсумнівно, що результати такого вивчення можуть істотно збагатити і власні властивості систем робототехніки і систем управління ними.
Протягом останнього часу швидкими темпами розробляються і отримують широке застосування в різноманітних виробництвах автоматичні маніпулятори з програмним управлінням (скорочено їх називають «промислові роботи»).
Сучасний промробот управляється не вручну людиною-оператором, а діє по жорсткій програмі: передбачається, що він працює в строго певних умовах, які стосуються не тільки його стану, але і «зовнішнього світу», з яким він взаємодіє. Можна сказати, що в «інтелектуальному» відношенні такі роботи знаходяться поки ще на першому етапі розвитку; в цьому сенсі часто їх називають “роботами першого покоління”.
Протягом ряду років, спочатку в США, потім у Японії, Англії та інших країнах ведуться дослідження та розробки моделей і макетів роботів наступних поколінь, які вміють сприймати інформацію із зовнішнього світу і досягати поставленої мети, керуючись не скрупульозно розробленою програмою, а більш загальними вказівками про те, як рухатися, діяти в тій чи іншій ситуації.
Мета цих робіт – створити технічні пристрої, що моделюють, нехай в самій обмеженій, примітивній формі, поведінку людини, коли та виконує цілеспрямовані рухи. Ця воістину грандіозна технічна задача викликала до життя відразу дві специфічні проблеми робототехніки. Одну з них ми формулюємо так: розробка принципів побудови, теорії, засобів і систем штучного відчуття роботів.
«Набір» систем відчуття поки дуже вузький; він обмежується пристроями штучного дотику, що складаються з матриць чутливих елементів, і пристроями штучного зору, що включають телекамеру, телеприймач і скануючу систему. Все це дозволяє роботу орієнтуватися лише в нерізноманітному і «нерухомому» середовищі і навіть при цьому його досить скромні сьогодні рухові можливості випереджають можливості інформаційні. Ця диспропорція призводить до неминучого і істотного збіднення функціональності і зниження “динамічності” системи.
Кардинальне завдання тут полягає в тому, щоб створити пристрої відчуття, які б забезпечували робота настільки змістовною інформацією і в такому темпі, щоб між його руховими та інформаційними властивостями була б досягнута певна гармонія. Тут знову потрібні нові ідеї, нові принципи побудови систем відчуття, нові технічні засоби, може бути, засновані на застосуванні ультразвуку, лазерної техніки і т. п.
Інша специфічна проблема робототехніки пов’язана з розвитком теорії, методів і алгоритмів побудови рухових функцій роботів. Ми формулюємо її так: розробка системи штучного інтелекту робота наділеного почуттями.
Зараз вже вважається загальновизнаним, що ця система повинна будуватися як якась багаторівнева ієрархічна структура, що визначає мету руху, його стратегію і тактику, принципи реалізації рухового завдання і т. д. В області розробки таких систем зроблено багато. Однак проблема ця настільки глибока і багатогранна, що ми, ймовірно, ще довгий час будемо перебувати тільки на порозі її вирішення.
Щоб дати деякі уявлення про підходи до вирішення окремих завдань, що охоплюються цією проблемою, звернемося до прикладу.

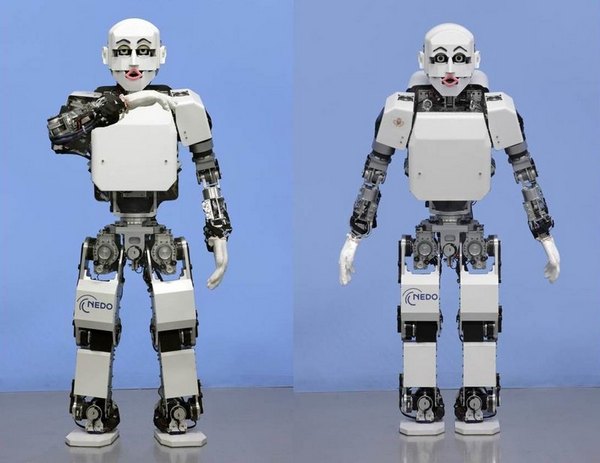
На малюнку умовно показаний виконавчий механізм робота — його рука. Це система високої розмірності, бо володіє великим числом ступенів рухливості — можливістю обертатися «в суглобах». Така конструкція — не надмірність, надмірність подібного роду, як вже говорилося, для робота — необхідність, так як тільки вона забезпечує йому високу функціональність. Але надмірність несе в собі проблему: робот може один і той же рух здійснити різними способами, і йому доводиться вирішувати, які ланки і в якому порядку пускати в хід. Так ось, які б не були принципи побудови системи штучного інтелекту робота, які б завдання йому не встановлювалися, обов’язок одного з його ієрархічних рівнів, а саме рівня побудови руху, завжди, по суті, залишається одним і тим же: визначати зміни координат виконавчих механізмів у часі.
Але для цього необхідно спочатку сформувати загальні та досить розумні принципи подолання рухової надмірності — тобто прийняти рішення, яким з можливих шляхів зробити потрібну операцію. Іншими словами, потрібно робота заздалегідь забезпечити деяким набором «поведінок» — так, щоб він міг керуватися якимись критеріями при реалізації будь-яких рухів.
В Інституті машинознавства розроблено метод вирішення цього завдання, в основу якого покладено нове поняття – про обсяг руху кінематичного ланцюга. Воно являє собою ще одну глобальну оцінку властивостей механічної системи високої розмірності, застосовну при будь-якій її структурі і для будь-якого її руху. І, що найголовніше, її можна систематично використовувати для подолання надмірності і побудови руху, оптимального в тому або іншому відношенні. Робиться це наступним чином.
Нехай закон руху захвату визначається у вигляді послідовності точок. Тепер ми можемо вимагати, щоб, наприклад, переміщення захвату здійснювалося самим, так би мовити, економним способом, тобто вимагало мінімальної суми кутів повороту всіх ланок штучної кінцівки. Тоді наступний рівень системи штучного інтелекту може отримати відповідну програму управління всіма підвладними йому ланками робота.
Подолання власної надмірності, свого роду «самопізнання» робота — один з невеликих елементів системи штучного інтелекту. Але разом з тим, нам доведеться розробити і удосконалити методи опису того зовнішнього середовища, в якому він призначений діяти, і тих об’єктів, з якими він маніпулює. У міру розширення функцій, реалізованих роботом, модель середовища стає все складніше і більш насиченіше. Тому все більше ускладнюються методи і алгоритми, що визначають доцільну поведінку робота, що виконує деяку технологічну задачу. Як окремі розділи проблеми штучного інтелекту роботів виникають і вимагають розробки теорії адаптації, навчання і планування поведінки роботів в різних середовищах. Природно очікувати появи нових мовних засобів управління роботом.

Нарешті, для інтелекту робота потрібні методи, алгоритми і системи переробки інформації, яка збирається штучними органами чуття: в інформаційних і керуючих каналах робототехнічної системи, як у нервовій мережі її живого прототипу, циркулюють потоки інформації, обсяг і змістовність яких зростає по мірі того, як ми підвищуємо свої вимоги до «кваліфікації» робота.
Внутрішня конструкція споруд, будівель, житлових будинків пристосована для пересування крокуванням. Сходи і пороги, вузькі коридори з крутими поворотами і нескінченними вузькими дверима уздовж них, цехи і контори, заповнені обладнанням і меблями, так само мало придатні для пересування коченням, як погано прохідна для колісних екіпажів будь-яка місцевість, ледь ви спробуєте з’їхати з шосе. І тому як тільки ми усвідомлюємо, що роботи дійсно повинні отримати широке застосування, відразу стане зрозуміла важливість проблеми, пов’язаної з розвитком теорії і принципів побудови опорно-рухових апаратів крокуючого типу.
Вчені наполегливо і плідно працюють в цьому напрямку. Зроблено чимало для того, щоб навчитися проектувати рушії крокуючого типу, вміти моделювати автономну поведінку крокуючого робота, що долає перешкоди на пересіченій місцевості. Результатів цих досліджень чекають і творці протезів та лікувальних апаратів нижніх кінцівок, необхідність в яких, як це не сумно, залишається вельми нагальною. Ось чому проблема переміщення, заснованого на принципах крокування, — а може бути, і на використанні інших принципів, вже відомих в живій природі,— має самостійне значення.
Вік робототехніки обчислюють зазвичай з початку сорокових років минулого століття — з моменту, коли були створені перші копіюючі маніпулятори. Вони явилися, так би мовити, технологічною базою робототехніки. Але до того ж часу відноситься інша, безсумнівно, більш важлива віха — створення ЕОМ – першого комп’ютера, бо сучасна робототехніка немислима без застосування обчислювальної техніки і, по суті, базується на ній.
Інформаційні процеси, що направляють рухову активність людини, настільки змістовні і протікають з такими швидкостями, що з великим запасом перекривають її фізичні можливості. Тільки за цієї умови людина може жити, працювати, вчасно орієнтуватися, приймати рішення, будувати рухи, долати перешкоди. Спроби моделювати ці процеси хоча б у самому грубому, першому наближенні можуть бути успішними тільки в тому випадку, якщо дотримати в моделі хоч в якійсь мірі ту гармонію між інформаційними руховими можливостями, яка є необхідною умовою існування живого прототипу. У цьому — мета і зміст однієї з важливих проблем робототехніки, проблеми організації обчислювальних процесів при функціонуванні роботів.
Ми спробували коротко характеризувати кілька найважливіших наукових проблем робототехніки. Рішення їх пов’язаіне з великими витратами, що вимагають праці великого числа вчених, науково-дослідних і проектно-конструкторських організацій.
Автори: І. Артоболевський, А. Кобринський.